
 Durante la Guerra Fría, la OTAN creía que los submarinos rusos estaban usando la capa de hielo en el Ártico canadiense como cobertura para moverse secretamente entre el Atlántico y el Pacífico. Entonces, Estados Unidos y Canadá colocaron una red de sonar especial allí, en lo profundo del hielo. Los ingenieros canadienses tuvieron que construir el vehículo submarino autónomo (AUV) más grande del mundo, Theseus, para tender un cable donde los barcos no pudieran llegar.
Durante la Guerra Fría, la OTAN creía que los submarinos rusos estaban usando la capa de hielo en el Ártico canadiense como cobertura para moverse secretamente entre el Atlántico y el Pacífico. Entonces, Estados Unidos y Canadá colocaron una red de sonar especial allí, en lo profundo del hielo. Los ingenieros canadienses tuvieron que construir el vehículo submarino autónomo (AUV) más grande del mundo, Theseus, para tender un cable donde los barcos no pudieran llegar.Obra original. HAGA CLIC para una imagen de alta resolución.
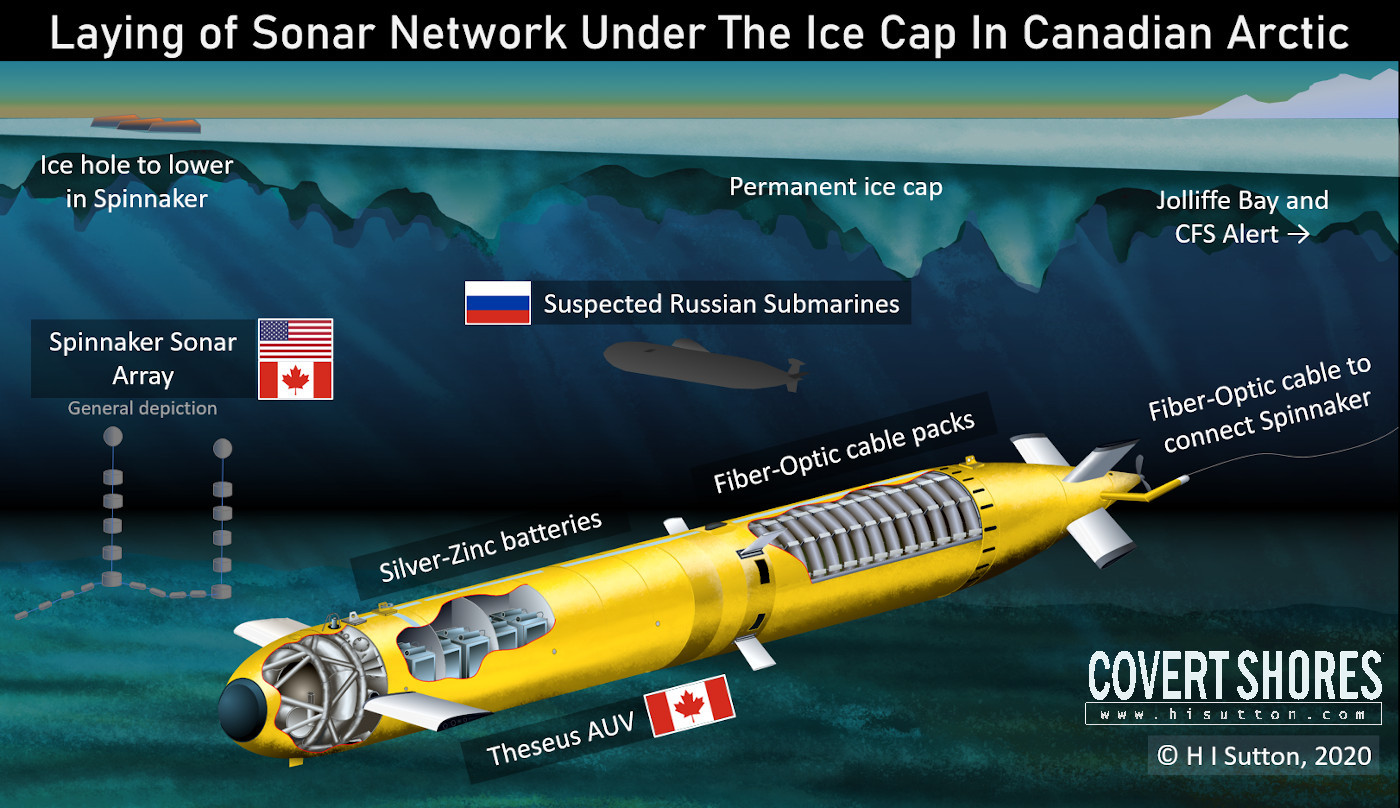
El proyecto comenzó en la década de 1980, en un momento en que los submarinos rusos se volvían mucho más silenciosos. Para escucharlos, se colocaría un conjunto de sonar conjunto de EE. UU. Y Canadá a varios cientos de millas al norte de la base remota de Canadá en CFS Alert. La matriz recibió el nombre en código de Spinnaker, en honor al bar donde los científicos tomaron muchas de las decisiones no clasificadas en el proyecto. Esto era similar al ahora famoso SOSUS (Sistema de vigilancia de sonido), pero utilizaba tecnología clasificada para adaptarse a sus circunstancias operativas. De hecho, debe haber sido mucho más avanzado que el SOSUS original.
Conectar el conjunto de sonda a la base requeriría colocar un cable de fibra óptica durante cientos de millas bajo una capa de hielo permanente. La solución fue construir el vehículo submarino autónomo más grande del mundo. El submarino sin tripulación nadaría desde un agujero de hielo más cerca de la base hasta el conjunto de Spinnaker. A medida que avanzaba, el cable se desenrollaría de la parte posterior. Así, 'Teseo' recibió su nombre del héroe mítico de la Antigua Grecia que siguió el hilo detrás de él cuando se aventuró en el laberinto para luchar contra el Minotauro.

El Theseus AUV, un submarino sin tripulación, está listo para ser bajado a través de un agujero de hielo. La persona sentada en el fondo muestra su escala. Crédito BRUCE BUTLER
Theseus fue construido por International Submarine Engineering (ISE: sitio web ) que ya había construido AUV bajo hielo. Se probó el tendido de cables en el sumergible autónomo controlado por control remoto (ARCS) más pequeño antes de que se construyera el extra grande Theseus.
Cuando pensamos en proyectos militares canadienses avanzados que se adelantaron a su tiempo, la Flecha Avro Canada CF-105 me viene a la mente. Ese caza Mach-2 con alas delta voló en la década de 1950 y era tecnología de punta en ese momento, uno de los mejores aviones de todos los tiempos. Pero se canceló abruptamente en 1959 antes de que pudiera entrar en servicio. El Theseus AUV está a la altura de la Flecha Avro, pero está menos reconocido. Y a diferencia de Arrow, se usó operacionalmente, en uno de los proyectos más audaces iniciados durante la Guerra Fría.
El proyecto tenía muchos aspectos secretos. Años después, gran parte de lo que sabemos sobre el proyecto proviene de Bruce Butler, uno de los principales equipos involucrados. Bulter ha escrito un libro, Into the Labyrinth ( sitio web del libro de Butler ), y recientemente habló con el Podcast de Tecnología Subacuática sobre el proyecto.
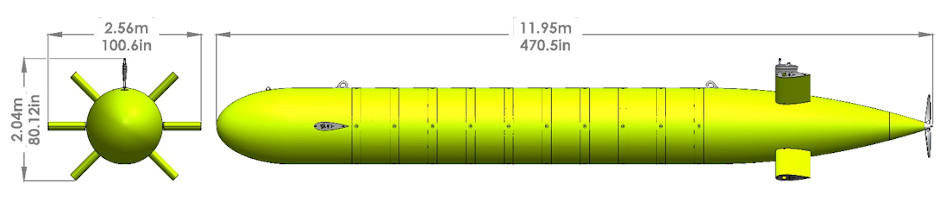
Imagen: ISE
El diseño tenía las baterías y la electrónica en un compartimento sellado similar a un submarino regular de casco único. Las baterías eran de plata y zinc, pero como eran costosas y frágiles, se usaron baterías de plomo-ácido tradicionales durante algunas pruebas. A diferencia de la mayoría de los otros AUV, el Theseus extra grande tenía tanques de lastre hacia adelante y hacia atrás. Estos fueron anulares, similares a algunos SDV.
Los paquetes de cables estaban en una gran sección de carga detrás del compartimento de la batería / electrónica. El área de carga útil se inundó, pero cada carrete de cable tenía su propio tanque de compensación envuelto alrededor. A medida que el cable se desenrollaba, los tanques se inundaron para compensar el peso reducido.
Teseo tenía 35 pies de largo y unos 4 pies de ancho. En términos de AUV esto es grande, incluso hoy. En la terminología naval moderna, se clasificaría como un vehículo submarino sin tripulación de gran desplazamiento (LDUUV).
El sistema de sonda Spinnaker se colocó en el fondo del mar justo en el borde de la plataforma ártica. Estaba a unos 84 grados al norte, en la esquina superior derecha de Canadá, cerca de Groenlandia. Un proyecto tan avanzado tardó años en realizarse, por lo que no fue hasta la primavera de 1996 cuando Theseus pudo ir a trabajar tendiendo el cable. Toda la operación estaba empujando los límites de los vehículos submarinos sin tripulación en ese momento. A pesar de algunas llamadas cercanas en el camino, Theseus pudo navegar hasta el Spinnaker, dejando escapar el hilo vital a medida que avanzaba.
Muchos detalles del proyecto y la tecnología involucrados aún se clasifican. Y es posible que nunca sepamos si Spinnaker alguna vez recogió submarinos rusos. Cuando se estableció, la Armada rusa estaba en fuerte declive tras el final de la Guerra Fría.
Pero con un resurgimiento de la Armada rusa en la actualidad, la relevancia de sistemas como Spinnaker puede ser mayor que nunca. Y uno de los roles que los drones submarinos grandes como el Orca podría hacer es tender cables en el fondo del mar, que no se ven desde arriba. Los antecedentes históricos como Theseaus pueden ayudarnos a comprender la forma en que se podrían emplear y los desafíos que enfrentarán.

Imagen: ISE
No hay comentarios:
Publicar un comentario